R3 / Larabee/ End-of-Arm-Tool
Google Robotics / Industrial Designer / 2014
About
The R3 is a 7 degree-of-freedom (DOF), teachable robotic manipulator. R3 was manufactured in low volumes, and released publicly as part of Google’s machine learning (ML) effort.
While mostly leveraged for ML research, R3 was initially designed as a collaborative device which could be trained by manually positioning its end-effector and recording way-points. Non-technical programmers could teach the device to do repeatable tasks like serve drinks or pick and place cupcakes.
The Google Robotic’s ID team was asked to design a controller tablet, Larabee, to augment R3’s manual programming experience. The team was also tasked with designing the end-of-arm-tool, which would act as the primary touch point for manual programming. Larabee and the end-of-arm tool went up to detailed design phases, however, never went into production.
Greg worked as industrial designer on Larabee and R3’s end-of-arm tool, bringing concepts from early sketch and prototype phases through detailed design.
Larabee Controller
The controller was intended for users to manage, play-back and fine-tune motion paths. Each DOF could be selected and manipulated through onscreen controls and physical dial. Due to the weight of the device (much greater than a standard tablet) and to maximize comfort, a rear, rotating, handle would allow for users to cradle Larabee with one hand for long working periods. Single handed usage would allow a freed up hand to position R3’s end-effector. The handle could be used a like stand, allowing Larabee to be positioned upright on a desktop. For safe operation, the tablet would have an accessible pause (E-stop) button as well as dead-man switches located on the rear handle. A light pipe running along the inside of the dial would indicate pairing with R3 during use.
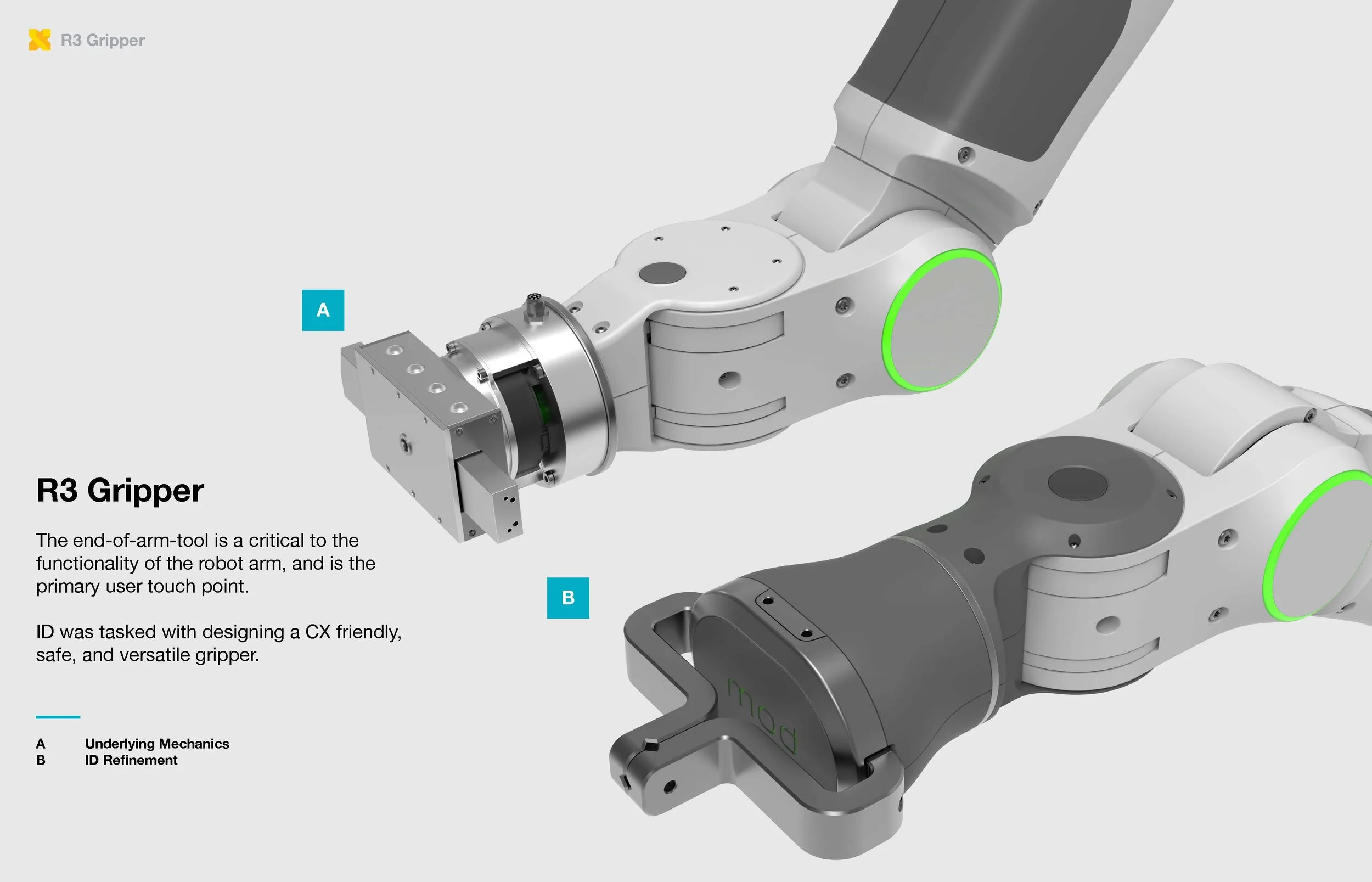
End-Of-Arm-Tool
The end-of-arm-tool was intended to provide an ergonomic touch point for users to reposition and program the R3. The large dished feature along the wrist joint would allow “blind” locating of the way-point button. To augment the gripper, users could design their own end-of-arm attachments, such as a cake icer, and affix them to the screw-points along the top and bottom of the gripper. Users could also replace digits with wider or narrower fingers. Proper gaps along the device surfaces would ensure pinch-point and physical safety hazard mitigation.